
Увод
Недозвољено преоптерећење и претовар камиона не само да уништава аутопутеве и мостовске објекте, већ лако изазива саобраћајне незгоде и угрожава безбедност живота и имовине људи. Према статистичким подацима, више од 80% саобраћајних незгода изазваних камионима је повезано са вангабаритним и преоптерећеним транспортом.
Традиционални режим контролних пунктова за прекорачење и преоптерећење транспорта има ниску ефикасност спровођења закона, што је лако изазвати феномен изостављања прекорачења возила, а режим контроле тачке директне детекције принуде ослања се на динамички систем аутоматског вагања и детекције да аутоматски детектује, идентификује и прегледа возила која пролазе 24 сата, како би се постигла прецизна и ефикасна контрола над оптерећењем возила. У циљу јачања управљања понашањем у преоптерећеном транспорту, обезбеђивања безбедности објеката на аутопуту, живота и имовине људи, систем директног спровођења прекорачења путева постепено је у потпуности промовисан и примењиван на аутопуту, а контрола прекорачења аутопута је постигла изузетне резултате, а контрола стопе прекорачења аутопута је контролисана у оквиру 0,5% од уобичајеног прекорачења пута, а такође је ефективно прекорачено прекорачење. обуздани.
Оквир система директног извршења
1. Оквир и функције система управљања
Режим директног спровођења односи се на аутоматско прикупљање релевантних података као што је тежина возила која пролазе кроз брзу и прецизну динамичку опрему за вагање, како би се утврдило да ли су теретна возила преоптерећена и транспортована, и ослањање на научна и технолошка средства да би се прибавили докази, и након тога обавестили и поступили са њима.
Информациони систем за управљање националним мрежама организује и конструише Министарство саобраћаја, а подаци о покрајинском систему се повезују и размењују, пружајући подршку међуресорној и међупокрајинској пословној координацији, и ефективно надгледајући рад националне управе и супер-управе; Пројекат на покрајинском нивоу организује и израђује покрајинско (аутономно подручје, општинско) одељење за саобраћај ради остваривања функција управљања пословањем и службе из надлежности, подршке покрајинском, општинском и окружном нивоу у обављању послова инспекције и повезивања са системом на нивоу министарства.
Узимајући Џеђанг као пример, умрежени систем управљања у покрајини усваја четворослојну структуру и управљање на три нивоа од врха до дна, који су следећи:
1) Покрајинска платформа управљања
Она игра улогу шест главних платформи у умреженом систему управљања покрајине, а то су: основна платформа за центар података, платформа за размену података, платформа за административне казне, платформа за једнократне незаконите помоћне пресуде, платформа за процену и евалуацију и платформа за статистичку анализу и приказ. Повежите се са мрежом служби покрајинске владе да бисте добили базу података о предметима, дискрециону базу података и базу података о особљу за спровођење закона и извештавали о информацијама о руковању административним казнама у реалном времену; Повезивање са системом саобраћајне полиције ради добијања информација о теретном возилу и информација о возачу, копирање информација о илегалном прекораченом превозу; Повезивање са системом управљања транспортом ради добијања информација о транспортним предузећима, теретним возилима итд. и копирање информација о илегалном прекораченом транспорту; Јединствени шаблон документа и основне информације и управљање црном листом/лиценцама управљачке станице; Реализовати помоћну одлуку једне казне за једно путовање вангабаритног превоза; Проценити и оценити рад покрајинских надзорних станица и рад суперконтролног посла; Кроз статистику и анализу података, оцењује се покрајинска политика управљања и суперуправе и даје се квантитативна подршка за увођење политике; Пружити релевантну законску и регулаторну подршку за рад управе на свим нивоима и успоставити пословну базу података на покрајинском, општинском и жупанијском нивоу.
2) Супер модул управљања на нивоу префектуре
Одговоран за свеобухватно управљање основним пословним информацијама у оквиру надлежности, статистичку анализу информација о прекорачењу, инспекцију за спровођење закона у локалном граду, административно поновно разматрање случаја, распоређивање пословања, инспекцију и процену локалног града.
3) Супер модул управе округа и округа
Примајте и чувајте податке о разним локацијама и објектима за откривање прекорачења у јурисдикцији (укључујући све врсте података о откривању прекорачења, слике и видео записе). Прикупите/прегледајте/потврдите податке о незаконитом прекорачењу у области, архивирање датотека и релевантне статистике, анализу и приказ у округу и округу.
4) станице за непосредну контролу извршења
Кроз форензичку опрему за динамичко мерење и хватање постављену на путу, добијају се тежина, регистарске таблице и друге релевантне информације о камиону у пролазу.
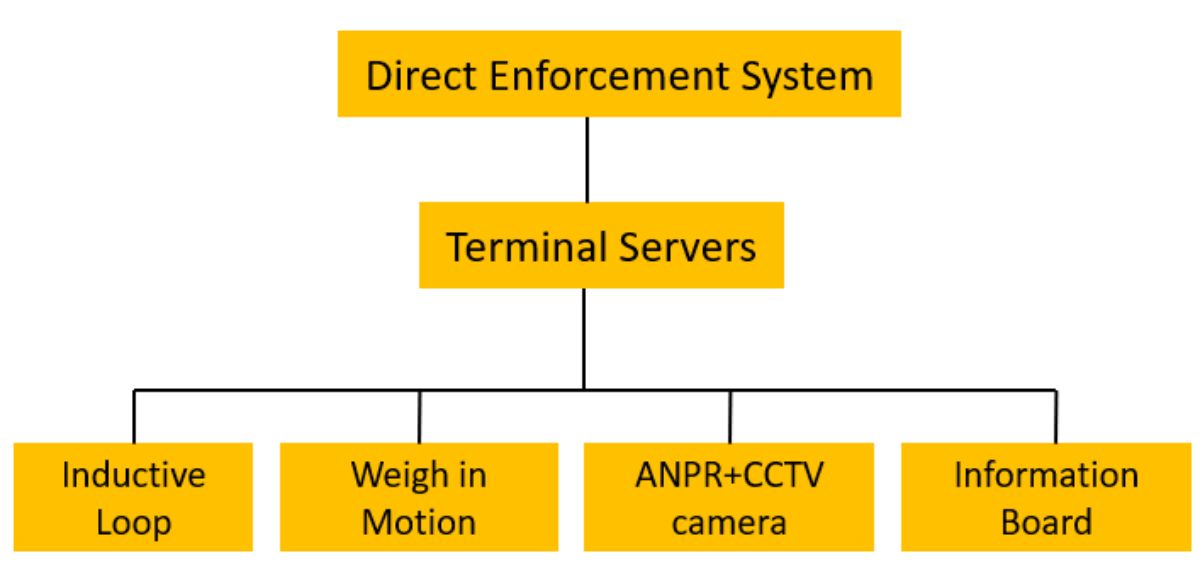
2. Састав и функција система директног извршења
Теренска опрема система директног спровођења (види слику 1) углавном укључује опрему за аутоматско мерење и детекцију, опрему за хватање и идентификацију возила, објекте за обавештавање о незаконитом понашању, опрему за видео надзор итд.
1) Опрема за вагање: укључујући сензоре за вагање, контролоре за вагање (индустријске рачунаре), дистрибутере аутомобила, итд., треба да верификују релевантне квалификоване мјерне институције, а резултати вагања могу се користити као основа за казну.
2) Опрема за препознавање и снимање високе дефиниције: користи се за прикупљање слика возила, укључујући регистарске таблице, стање каросерије, бројеве регистарских таблица и боје које могу да идентификују возила.
3) Опрема за видео надзор: употреба опреме за видео надзор за добијање процеса аутоматске опреме за детекцију вагања за камионе, а информације о праћењу добијене опремом за видео надзор могу се користити као доказ.
4) Опрема за ослобађање информација: преко променљиве информативне табле, возило које је тестирано и прегажено може се издати у реалном времену да прекорачи обавештење и води возача камиона до најближег места за истовар ради истовара.
Дизајн тачака детекције директног спровођења
Избор локације пројекта
Да би се побољшала ефикасност прекомерне употребе, станице за директну инспекцију треба изабрати у складу са принципом „укупног планирања и јединственог распореда“, а приоритет треба дати путевима са следећим карактеристикама:
1) Камиони су озбиљно прегажени или камиони морају проћи путем;
2) саобраћајнице повезане са кључним заштићеним мостовима;
3) Покрајинске границе, границе општина и других административних подручја укрштања путева;
4) Сеоски путеви који су лаки за обилазак возила.
2. Пројектовање уређаја за вагање
2.1. Динамичке камионске ваге
Динамичка камионска вага је аутоматска вага која се користи за мерење уздужне масе (бруто тежине), осовинског оптерећења и оптерећења групе осовина када возило пролази, а углавном има оптерећење
Уређај, део за обраду података и инструмент за приказ су састављени, при чему је део за обраду података најчешће пројектован у облику контролног ормана. Према различитим носачима, динамичке ваге за камионе могу се поделити на тип возила, тип осовинског оптерећења, тип двоструке платформе, тип групе осовина, тип комбинације са више распореда и тип равне плоче такође се могу сматрати категоријом типа групе осовина. Принцип рада носача је да мери електрични сигнал када носач носи оптерећење гуме, а затим га претвара у масу возила кроз појачање и обраду сигнала, који се могу поделити у две категорије: тип мерача напрезања и тип кварцног кристала.
Под условом да се испуне захтеви тачности детекције, треба одабрати одговарајућу динамичку камионску вагу у складу са условима на путу, и подстицати употребу нове технологије за мерење високе прецизности, ниске цене и у складу са стандардима, а камиони који се могу ставити у ред и проћи кроз подручје нон-стоп детекције вагања могу се прецизно раздвојити.
2.2. Распоређивање вањске опреме
Слика 2 је типичан дијаграм распореда станица за директно спровођење, а Табела 1 су функционални захтеви главне опреме. Када је тачка детекције директне принуде постављена на једном коловозу, динамичка камионска вага треба да се постави на целом попречном пресеку пута, а ако се цео пресек не може поставити због услова, треба додати изолационе објекте као што су вожња у погрешном правцу и вожња како би се избегло да возила избегавају мерење.
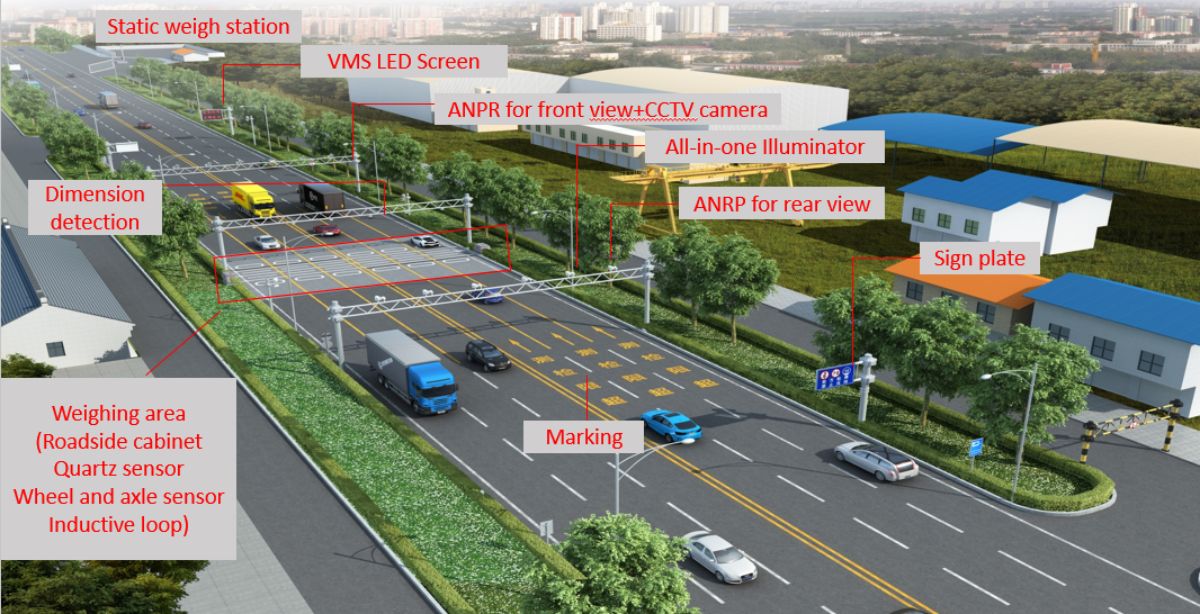
Слика 2. Типични дијаграм станице за директно извршење
Табела 1. Функционални захтеви кључног уређаја
| Назив уређаја | Захтеви за кључне карактеристике: | |
| 1 | Динамичке камионске ваге | Може аутоматски детектовати време, број осовина, брзину, једноосовинско осовинско оптерећење, укупну тежину возила и терета, међуосовинско растојање и друге информације о возилу; Може прецизно одвојити режим чекања кроз теретно возило; Може да се носи са ненормалним стањем вожње теретних возила као што су промена траке и прекид брзине; Може да пренесе информације о прекорачењу предњег камиона систему управљања у реалном времену; Може да задовољи непрекидан континуирани рад у свим временским условима у стању без надзора; Требало би да има функцију самотестирања грешке |
| 2 | Опрема за препознавање и снимање регистарских таблица | треба да буде опремљен светлом за пуњење или трепћућим светлом; Може јасно да забележи број регистарске таблице, има конфигурацију за заштиту животне средине и препоручује се коришћење три у једном лампи за пуњење да би се избегло светлосно загађење; Могућност снимања слика регистарских таблица теретних возила у ЈПГ формату пуног формата; Требало би да буде у стању да сними 1 слику предњег дела високе дефиниције, а према информацијама о слици, требало би да буде у стању да јасно разликује подручје регистарске таблице теретног возила, карактеристике предњег дела и кабине и боју предњег дела аутомобила; Опрема за идентификацију и хватање возила треба да буде у стању да ухвати слику возила које пролази кроз подручје детекције вагања без заустављања из више углова са стране и репа, и треба да буде у стању да јасно разликује број осовина теретног возила, боју каросерије и основну ситуацију транспортоване робе према информацијама о слици; Опрема за идентификацију и хватање возила треба да има функцију самоинспекције квара; Уређај за хватање абнормалних догађаја подржава функцију детекције ненормалног преласка возила и линије сабијања. |
| 3 | Опрема за видео надзор | Форензичке слике треба да буду најмање 2 милиона пиксела и треба да буду заштићене од неовлашћеног приступа. |
| 4 | Опрема за објављивање информација | Требало би да буде у могућности да возачу у реалном времену објави информације о детекцији прекорачења возила и требало би да може да реализује смењивање текста, померање и друге методе приказа. |
Када се открије да је возило за које се сумња да је преоптерећено, регистарска таблица ће бити приказана преко променљиве информативне табле и возило ће бити упућено на оближњи контролни пункт за преоптерећени транспорт на обраду. Подешавање растојања између информативне табле и динамичке камионске ваге треба да задовољи захтеве вида возила, а препоручује се одабир одговарајућег типа променљиве информативне табле и растојања за подешавање у складу са условима на путу; Када растојање између информативне табле и динамичке скале камиона не испуњава захтеве возача за видљивост због услова поравнања пута, препоручује се да се ограничи брзина вожње камиона или подеси угао ЛЕД честица информационе табле како би се побољшало време видљивости возача.
3. Дизајн мера за смањење грешака у вагању
Према захтевима поделе преоптерећења у казненом стандарду, у случају брзине трчања од 1~80км/х, укупна тежина возила и терета у динамичком вагању треба да испуњава захтеве нивоа тачности од 10, а проценат уговорене праве вредности укупне тежине возила не прелази грешку првог прегледа и накнадног прегледа.
± 5,00%, а грешка испитивања у употреби не прелази ±10,0%.
Да би се грешка узрокована факторима коловоза свела на мерење, коловоз у зони која утиче на мерење пре и после опреме за мерење у станицама за директно извршење треба да испуњава следеће захтеве:
1) уздужни нагиб не треба да буде већи од 2%, а бочни нагиб коловоза не већи од 2%;
2) када се на цементном коловозу између цементног бетона за засипање и постојећег цементног коловоза поставља деформациона фуга, вучна шипка и испуна;
3) Када је на асфалтном коловозу, усваја се нагибни прелаз између цементног бетона за затрпавање и постојећег асфалтног површинског слоја. Станица за спровођење смерница
изборне тачке треба избегавати постављање на следећим деоницама пута:
1) Деоница пута у кругу од 200м од раскрснице у нивоу;
2) број промена трака на деоници пута;
3) деонице надвожњака (аеродинамички утицај) и прилазног моста (лоша униформност);
4) делови мостова или других објеката који ће имати динамички утицај на возила;
5) Деонице испод или у близини радиопредајних станица и железничких колосека испод високонапонских далековода.
Поред тога, да би се смањила грешка у вагању узрокована понашањем возила у вожњи, у одељку за мерење треба предузети следеће мере:
1) када је трака за вожњу са више трака, разделна линија коловоза заузима пуну линију, а возилима је забрањено мењање траке;
2) Када је деоница пута добра и лака за брзу вожњу, поставите знак ограничења брзине камиона испред области за детекцију вагања;
3) Да би се сузбила понашања у вожњи која намерно избегавају казну, као што су блокирање регистарских таблица, вожња у погрешном смеру, чекање у реду и затварање, може се додати опрема за нелегално хватање и идентификацију.
Закључак
Да сумирамо, распоред тачака детекције директног спровођења треба да буде свеобухватно одређен након свеобухватног разматрања регионалне путне мреже, стања путева и околног окружења, а пројектовање смањења грешака треба да буде спроведено у складу са условима пута на локацији локације како би се смањиле грешке у процесу рада и одржавања. Да би се смањили трошкови изградње вагања у покрету, поред свеукупног планирања и разумног одабира тачака распореда, потребно је и разјаснити орган управљања, координирати управљање из више одељења и углова и тежити смањењу понашања преоптерећења из извора.

Енвико Тецхнологи Цо., Лтд
E-mail: info@enviko-tech.com
хттпс://ввв.енвикотецх.цом
Канцеларија у Ченгдуу: бр. 2004, јединица 1, зграда 2, бр. 158, 4. улица Тианфу, зона високе технологије, Ченгду
Канцеларија у Хонг Конгу: 8Ф, Цхеунг Ванг Буилдинг, 251 Сан Вуи Стреет, Хонг Конг
Фабрика: зграда 36, индустријска зона Јињиалин, град Мианианг, провинција Сечуан
Време поста: мар-09-2024




