
Прво, састав система
1. Систем нон-стоп детекције преоптерећења аутопута се генерално састоји од система за прикупљање информација о преоптерећењу предњег теретног возила и форензичког система и позадинског управљања информацијама о преоптерећењу теретног возила.
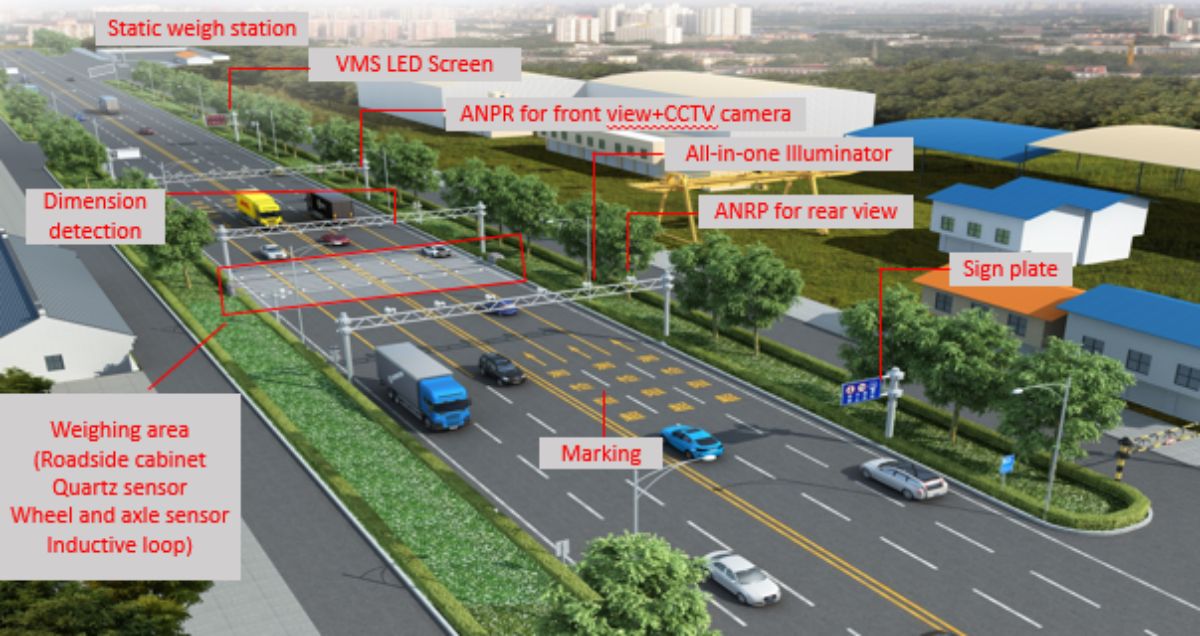
2. Предњи систем за прикупљање информација о преоптерећењу теретног возила и форензички систем се генерално састоји од опреме за нон-стоп вагање, опреме за детекцију величине профила возила, опреме за препознавање и снимање регистарских таблица, детектора возила, опреме за видео надзор, опреме за издавање информација, саобраћајних знакова, објеката за напајање и заштиту од грома, контролних ормара на лицу места, опреме за прикупљање и обраду информација, знакова који се не обрађују и опреме за пренос података на мрежи, опреме за подршку за откривање саобраћајних знакова објеката.
3. Позадинска платформа за управљање информацијама о преоптерећењу теретних возила (укључујући директну примену) се генерално састоји од платформи за управљање информацијама о преоптерећењу округа (округ), општина и покрајина (укључујући директну примену).
2. Функционални захтеви
1. Функционални захтеви за опрему за мерење без заустављања
1.1 Опсег радне брзине
Опсег брзине опреме за мерење без заустављања је (0,5~100) км/х да би теретна возила прошла кроз подручје нон-стоп детекције.
1.2 Ниво тачности укупне тежине возила
(1) Максимална дозвољена грешка вагања укупне масе возила и терета у оквиру дозвољеног опсега радних брзина опреме за мерење без заустављања не сме бити нижа од одредби и захтева нивоа тачности 5 и 10 у ЈЈГ 907 „Прописи за верификацију аутоматске ваге за динамичко аутопутско возило 2-1Т“ (1Т).
Табела 2-1 Максимална дозвољена грешка динамичког вагања укупне тежине возила
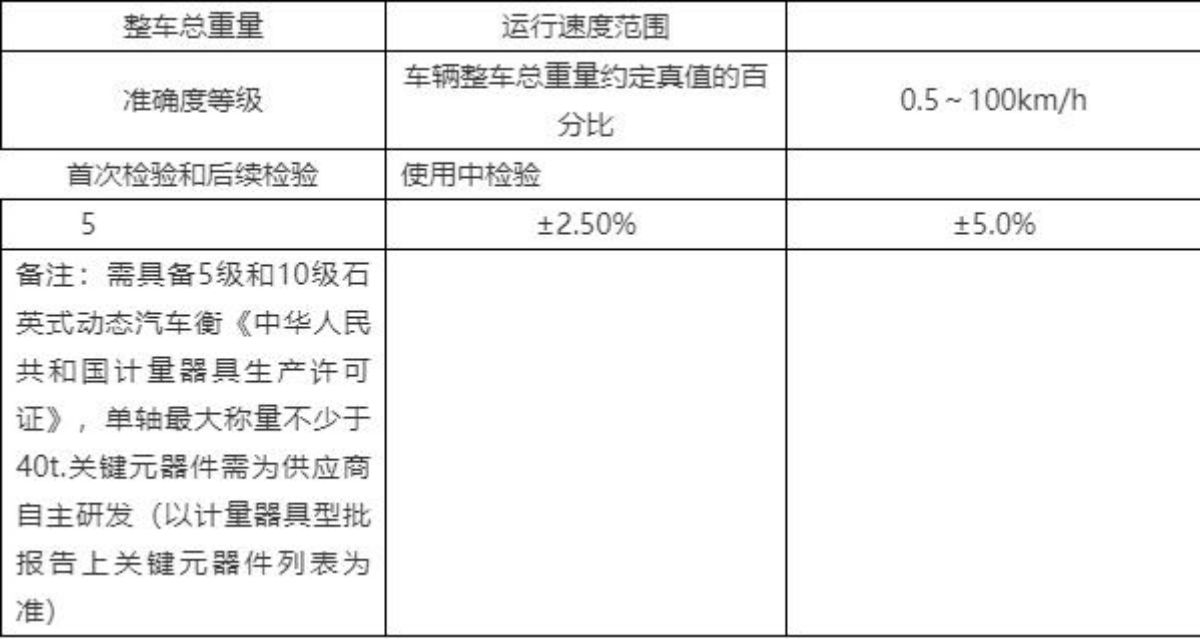
(2) Када теретно возило у кратком временском периоду прође кроз подручје детекције вагања без заустављања са абнормалним понашањем у вожњи као што су често убрзавање и успоравање, прескакање скале, заустављање, С кривина, укрштање, потисни вод, вожња уназад или заустављање и кретање, ниво тачности укупне тежине возила нон-стоп вагања не сме бити нижи од захтева опреме за мерење из табеле-1 и не сме бити нижи од захтева из табеле-2. (Важни су притиснути траке и вожња у супротном смеру).
1.3 Мерна ћелија која се користи у опреми за мерење без заустављања мора да буде у складу са одредбама и захтевима ГБ/Т7551 „Ћелије за оптерећење“, радни век ће бити ≥ 50 милиона осовина, а ниво заштите ћелије за мерење мерења која се користи у непрекидном мерењу не сме бити мањи од ИП68. 。
1.4 Просечно време рада без прекида рада опреме за мерење без прекида не сме бити мање од 4000х, а гарантни рок кључних компоненти не сме бити краћи од 2 године, а радни век не сме бити мањи од 5 година.
1.5 Захтеви за заштиту од искључења
(1) Када је напајање искључено, опрема за вагање без заустављања треба да буде у стању да аутоматски складишти тренутно постављене параметре и информације о вагању, а време складиштења не би требало да буде мање од 72 сата.
(2) У случају нестанка струје, време рада унутрашњег сата опреме за мерење без прекида не би требало да буде мање од 72д.
1.6 Захтеви за третман против корозије
Изложени метални делови опреме за мерење без заустављања треба да се третирају антикорозивним третманом у складу са релевантним одредбама ГБ/Т18226 „Технички услови за антикорозивну заштиту челичних компоненти у инжењерингу саобраћаја на путевима“.
1.7 Грешка мерења брзине детектора возила опреме за мерење без заустављања треба да буде ≤± 1км/х, а тачност детекције саобраћајног тока треба да буде ≥99%.
1.8 Технички захтеви за сепараторе возила за опрему за мерење без заустављања су следећи:
(1) Тачност детекције броја оса треба да буде ≥98%.
(2) Грешка детекције размака осовине треба да буде ≤± 10цм.
(3) Тачност класификације возила треба да буде ≥ 95%.
(4) Стопа међуканалног препознавања треба да буде ≥98%.
1.9 Применљиви опсег температуре радног окружења треба да буде -20°Ц~+80°Ц, а технички индикатори отпорности на влагу животне средине треба да испуњавају релевантне прописе и захтеве спољне механичке и електричне опреме ЈТ/Т817 "Општи технички захтеви и методе испитивања опреме електромеханичког система на аутопуту".
1.10 Треба предузети мере за заштиту од кише и прашине, а ниво заштите треба да испуњава одредбе и захтеве ЈТ/Т817.

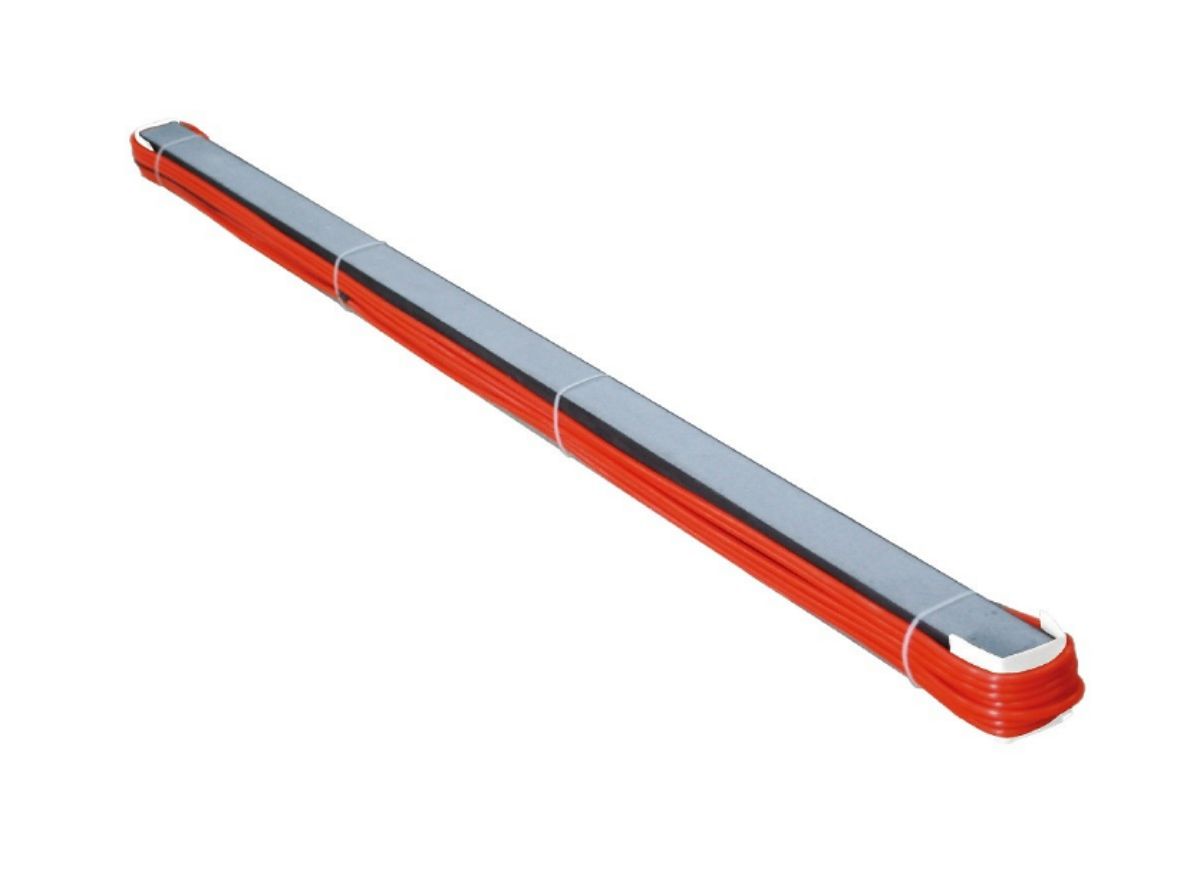
2. Функционални захтеви за опрему за испитивање величине профила возила
2.1 Када теретно возило прође кроз подручје нон-стоп детекције вагања брзином од (0,5~100) км/х, требало би да буде у стању да аутоматски заврши брзу детекцију геометријских димензија и 3Д модела дужине, ширине и висине теретног возила у реалном времену и да испостави тачне резултате идентификације. Време одговора не би требало да буде мање од 30 мс, а време за завршетак једне детекције и излазног резултата не би требало да буде дуже од 5 с.
2.2 Геометријски опсег мерења дужине, ширине и висине теретног возила треба да испуни захтеве табеле 2-2.
Табела 2-2 Опсег мерења опреме за испитивање величине профила возила
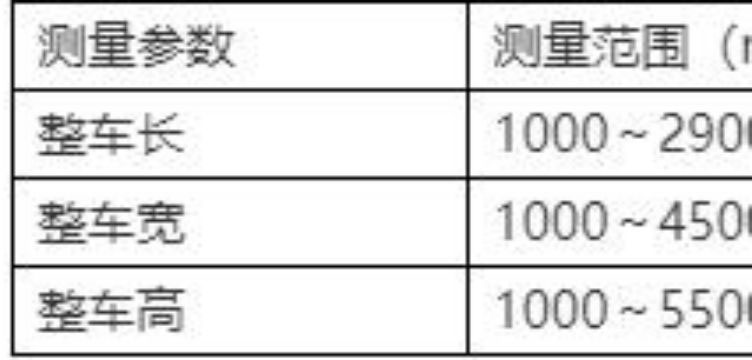
2.3 Резолуција мерења геометријских димензија дужине, ширине и висине теретног возила није већа од 1 мм, а грешка мерења опреме за детекцију обриса возила треба да испуни следеће захтеве у опсегу од 1 ~ 100 км/нормалне радне брзине: (у смислу брзине трчања, требало би да буде у складу са захтевима претходне опреме за динамичко вагање).
(1) Грешка дужине≤±500мм;
(2) Грешка у ширини≤±100мм;
(3) Грешка висине ≤± 50 мм.
2.4 Учесталост детекције ласерске тачке опреме за тестирање величине профила возила треба да буде ≥1кХз, а требало би да има 9 типова модела возила и функције детекције брзине возила наведене у моторном возилу ГБ1589 „Оквирна величина, осовинско оптерећење и ограничења квалитета аутомобила, приколица и аутомобилских возова“.
2.5 Требало би да има функције паралелних теретних возила, процену стања вожње у С- кривини, заштиту од црног материјала и детекцију геометријске величине профила теретног возила са високом рефлективношћу.
2.6 треба да садржи класификацију модела теретних моторних возила, обим саобраћаја, брзину локације, временску удаљеност испред, праћење процента аутомобила, размак испред, функције детекције времена заузетости. А тачност класификације модела теретних моторних возила треба да буде ≥ 95%.
2.7 Применљиви опсег температуре радног окружења треба да буде од -20 °Ц ~ +55 °Ц, а технички индикатори отпорности на влагу животне средине треба да испуњавају релевантне прописе и захтеве спољне механичке и електричне опреме ЈТ/Т817 „Општи технички захтеви и методе испитивања опреме за електромеханички систем на аутопуту“.
2.8 Опрема за испитивање величине ласерског профила возила треба да буде инсталирана са порталом са каналом за одржавање
2.9 Ниво заштите опреме за испитивање величине профила возила не сме бити нижи од ИП67.
3. Функционални захтеви за опрему за препознавање и снимање регистарских таблица
3.1 Функционални захтеви опреме за препознавање и хватање регистарских таблица морају испунити релевантне одредбе и захтеве ГБ/Т 28649 „Аутоматски идентификациони систем за регистарске таблице моторних возила“.
3.2 Опрема за препознавање и хватање регистарских таблица треба да буде опремљена светлом за пуњење или трепћућим светлом, које ће бити у стању да јасно ухвати број возила које пролази кроз подручје нон-стоп детекције вагања у свим временским условима и да испоручи тачан резултат идентификације.
3.3 Опрема за препознавање и снимање регистарских таблица треба да буде ≥ 99% тачности препознавања регистарских таблица током дана, и ≥95% тачности препознавања регистарских таблица ноћу, а време препознавања не би требало да буде више од 300 мс.
3.4 Слика сакупљене регистарске таблице теретног возила треба да буде јасно објављена у ЈПГ формату пуне ширине, а резултат препознавања треба да садржи време препознавања, боју регистарске таблице итд.
3.5 препознавање регистарских таблица пиксели слике за снимање не би требало да буду мањи од 5 милиона, остали пиксели за снимање не би требало да буду мањи од 3 милиона, теретна возила кроз област детекције нон-стоп вагања треба да сниме предњи део возила, две стране возила и задњи део возила укупно најмање 4 слике високе резолуције.
3.6 Према предњој слици високе дефиниције, површина регистарске таблице теретног возила, карактеристике предње и кабине, предња боја итд., треба да буду у стању да јасно разликују број осовина, боју каросерије и основну ситуацију транспортоване робе према информацијама о слици високе дефиниције на бочној страни возила; према информацијама о слици високе дефиниције задњег дела возила, може се разликовати број задње регистарске таблице, боја каросерије и друге информације.
3.7 Свака слика треба да буде прекривена информацијама као што су датум откривања, време тестирања, локација тестирања, укупна тежина возила и терета, димензије возила, број опреме за форензичку слику, заштита од фалсификовања и друге информације.
3.8 Пропусни опсег канала за пренос информација о снимљеној слици не сме бити мањи од 10 Мбпс.
3.9 Требало би да има функције самопровере грешака као што су ненормална комуникација и нестанак струје.
3.10 Применљиви опсег температуре радног окружења треба да буде од -20 °Ц ~ +55 °Ц, а технички индикатори отпорности на влагу животне средине треба да испуњавају релевантне прописе и захтеве спољне механичке и електричне опреме ЈТ/Т817 "Општи технички захтеви и методе испитивања опреме за електромеханички систем на аутопуту".
3.11 Ниво заштите опреме за препознавање и снимање регистарских таблица не сме бити нижи од ИП67.
4 Функционални захтеви опреме за видео надзор
4.1 камера за видео надзор треба да има функцију инфрацрвене дневне и ноћне камере, и треба да буде у стању да нон-стоп детектује област вагања функције свеобухватне камере и сачува најмање 10 секунди илегалног теретног возила о преоптерећењу доказа о прикупљању видео података.
4.2 Требало би да има функције самодијагнозе, калибрације видног поља и аутоматске компензације.
4.3 Форензичке видео слике не би требало да буду мање од 3 милиона пиксела и треба да буду јасне и стабилне.
4.4 Требало би да има функцију ротације и зумирања, а хоризонтална и вертикална ротација и зумирање објектива могу се извршити према контролној команди.
4.5 Требало би да има функцију чишћења и уклањања светла за маглу за кишу и мраз, и требало би да буде у стању да на време чисти, загрева и одлеђује заштитни поклопац.
4.6 Форензичке видео слике треба да се пренесу на окружни (градски) ниво за управљање информацијама о преоптерећењу и платформу за директно спровођење у реалном времену.
4.7 Опрема за видео надзор и други технички индикатори њене опреме морају испуњавати релевантне одредбе и захтеве ГА/Т995.
4.8 Применљиви опсег температуре радног окружења треба да буде -20°Ц~+55°Ц, а технички индикатори отпорности на влагу животне средине треба да испуњавају релевантне прописе и захтеве спољне механичке и електричне опреме ЈТ/Т817 "Општи технички захтеви и методе испитивања опреме за електромеханички систем на аутопуту".
5 Функционални захтеви за опрему за објављивање информација
5.1 Требало би да буде у могућности да у реалном времену даје информације о преоптерећењу возила возачу илегалног возила преоптерећења.
5.2 Требало би да буде у могућности да објављује и приказује информације као што су смењивање текста и померање.
5.3 Главни функционални индикатори и технички индикатори ЛЕД променљивих информативних знакова за аутопут морају да испуњавају релевантне одредбе и захтеве ГБ/Т23828 „Лед променљиви информативни знакови за аутопут“.
5.4 Двостубни портални тип аутопута са ЛЕД променљивим информацијама на екрану за екран који се обично користи Размак пиксела може се изабрати: 10 мм, 16 мм и 25 мм. Величина површине приказа од четири траке и шест трака може бити 10 квадратних метара, односно 14 квадратних метара. Формат садржаја приказа може бити 1 ред и 14 колона.
5.5 Размак између пиксела једностубног ЛЕД дисплеја са променљивим информацијама може се изабрати: 10 мм, 16 мм и 25 мм. Величина екрана се може изабрати између 6 квадратних метара и 11 квадратних метара. Формат садржаја приказа може бити 4 реда и 9 колона.
5.6 Дизајн и постављање ЛЕД променљивих информационих знакова за аутопут и удаљеност визуелног препознавања треба у потпуности да узму у обзир стварну брзину и потребе визуелног препознавања теретних возила у деоници пута, и да испуне релевантне одредбе и захтеве ГБ/Т23828 „Лед променљиви информативни знакови за аутопут“.
6 Захтеви за постављање саобраћајних знакова
6.1 Поставите саобраћајни знак за улазак у „зону нон-стоп вагања и детекције“ на удаљености не мањој од 200 метара испред зоне нон-стоп детекције вагања.
6.2 Поставите саобраћајни знак „забрањено мењање траке“ на удаљености не мање од 150 метара испред зоне за нон-стоп детекцију мерења.
6.3 Поставити саобраћајни знак „Укинути забрану промене траке“ на удаљености не мањој од 200 метара иза зоне детекције нон-стоп вагања.
6.4 Постављање саобраћајних знакова у зони детекције без престанка вагања мора бити у складу са дизајном и захтевима ГБ5768 „Снакови и ознаке на путу“.
7. Захтеви за опрему за напајање и громобранско уземљење
7.1 Систем за прикупљање информација о преоптерећењу и форензички систем треба да буде опремљен стабилним и поузданим линијама напајања, које ће бити у стању да испуне захтеве 24-часовног непрекидног рада напајања.
7.2 Неопходне мере заштите од грома и пренапона биће предузете за интерфејс за напајање и контролни интерфејс за прикупљање информација о преоптерећењу и форензички систем и повезане компоненте, а заштитне мере ће бити у складу са релевантним одредбама и захтевима ЈТ/Т817 „Општи технички захтеви и методе испитивања за опрему електромеханичког система на аутопуту“.
7.3 Систем за прикупљање информација о преоптерећењу и форензички систем треба да усвоји метод оближњег уземљења у једној тачки, а метод паралелног уземљења једносмерне струје треба да буде усвојен.
7.4 Заштита од грома и електрична отпорност опреме за прикупљање информација о преоптерећењу и форензичке опреме треба да буде ≤ 10 Ω, а отпор заштитног уземљења треба да буде ≤ 4 Ω.
8 Функционални захтеви контролног ормана на терену

8.1 Контролни ормар на лицу места конфигурисан са системом за прикупљање информација о преоптерећењу и форензичким системом треба да буде у стању да складишти процесоре за прикупљање података, детекторе возила, мрежне прекидаче и другу опрему. Требало би да буде у могућности да отпреми информације о преоптерећењу камиона на Свеобухватну административну платформу за директно спровођење саобраћајног центра Покрајинског одељења за саобраћај и да може да пренесе информације о преоптерећењу камиона на променљиву информацију о ЛЕД знаку аутопута у реалном времену за објављивање и приказ.
8.2 Управљачки орман треба да буде пројектован са двослојном заптивком шасије, која може ефикасно да спречи прашину и кишу, и има независни систем контроле температуре.
8.3 Управљачки орман треба да буде дизајниран са уторима како би се олакшало проширење функције.
8.4 Контролни орман треба да буде опремљен опремом за заштиту података како би се избегло цурење података за детекцију прекорачења.
9. Захтеви за постављање нон-стоп зона за мерење за преоптерећење аутопута
9.1 Подручје за нон-стоп детекцију вагања састоји се од нон-стоп носача опреме за вагање (сензор кварцног кристала) и његових водећих делова на предњем и задњем крају (према очврслој површини пута од 30 метара испред и 15 метара позади) (Слика 2-1).

Слика 2-1 Шематски дијаграм области нон-стоп вагања
9.2 Локација подручја за непрекидно вагање и тестирање не би требало да буде лоцирана у равни, полупречник уздужне кривине је мали, видна удаљеност је лоша, а дуги низбрдо и други деонице пута, а линеарни индикатори треба да испуњавају АСТМ Е1318 „Стандардне спецификације за системе за вагање у покрету на аутопуту и системе за тестирање (ВИМ)“. Методе, специфични захтеви су следећи:
(1) Полупречник скретања средишње линије пута 60 м водећих деоница и задњег 30 м водећих деоница пута у области нон-стоп детекције вагања треба да буде ≥ 1,7 км.
(2) Уздужни нагиб површине пута у предњем одсеку за вођење од 60 м и задњем одсеку пута за вођење од 30 м у области детекције без престанка вагања треба да буде ≤2%.
(3) Вредност попречног нагиба коловоза и предњег 60 м водећих деоница пута и задњег 30 м водећих деоница пута у области детекције нон-стоп вагања треба да буде 1% ≤ и ≤2%.
(4) Не би требало да постоје препреке које блокирају видљивост возача у оквиру 150 м деонице пута за вођење пре подручја детекције нон-стоп мерења.
(5) Удаљеност између локације нон-стоп зоне вагања и детекције и улаза и излаза из тунела аутопута на истој дионици пута не смије бити мања од 2 км и не смије бити мања од 1 км.
(6) Хоризонтална грешка везе између сензора и површине пута није већа од 0,1мм
9.3 Да би се осигурала тачност података о нон-стоп вагању и безбедност вожње, изолација путне траке предњег 60 м водичног дела пута и задњег 30 м водећих деоница пута у области детекције непрекидног вагања треба да буду изоловане пуном линијом.
9.4 Простор за непрекидно мерење и испитивање за вођење изградње деоница пута
(1) Коловоз дионице водилице треба да буде стабилан, а коефицијент трења коловоза треба да одговара пројектним захтјевима дионице пута.
(2) Коловозна површина деонице водилице треба да буде глатка и компактна, а на асфалтном коловозу не сме бити коловоза, рупа, слегања, загушења, пукотина, мрежних пукотина, испупчења, а на цементном коловозу не сме постојати поремећене, изломљене плоче, слегање, накупљање блата и друга обољења. Равност цементно-бетонског коловоза и асфалтно-бетонског коловоза треба да испуњава релевантне одредбе и захтеве ЈТГФ80-1 „Стандарди за инспекцију и оцену квалитета инжењеринга аутопутева“.
(3) Ширина коловозне површине деонице пута која води треба да буде у стању да подржи нормалан пролаз најширег теретног возила унутар опсега мерења.
(4) Средишњу линију коловоза у простору за непрекидно мерење и испитивање треба изоловати двоструким жутим (једноструким жутим) пуним линијама, а линију разграничења коловоза треба изоловати белим пуним линијама.
3. Захтеви за протокол интерфејса и формат података
Протокол интерфејса и формат података система за непрекидну детекцију преоптерећења аутопута треба да испуњава релевантне одредбе и захтеве „Фуџијанског свеобухватног административног плана пројектовања директног спровођења саобраћаја“ како би се обезбедила међусобна повезаност и дељење информација између платформи за управљање информацијама о преоптерећењу округа (округ), општина и покрајина (укључујући директну примену).

Енвико Тецхнологи Цо., Лтд
E-mail: info@enviko-tech.com
хттпс://ввв.енвикотецх.цом
Канцеларија у Ченгдуу: бр. 2004, јединица 1, зграда 2, бр. 158, 4. улица Тианфу, зона високе технологије, Ченгду
Канцеларија у Хонг Конгу: 8Ф, Цхеунг Ванг Буилдинг, 251 Сан Вуи Стреет, Хонг Конг
Фабрика: зграда 36, индустријска зона Јињиалин, град Мианианг, провинција Сечуан
Време поста: 25.01.2024




